Returning to a SONAR Target
Posted: Sat Dec 31, 2016 11:30 am
Returning to a SONAR Target
Let us say we are boating and looking for a particular target on a SONAR. The target is stationary and is on the sea bottom. The water depth is 100-feet. We are using a SONAR transducer with a circular pattern and a cone angle of 30-degrees of flat response. While boating we observe a target on SONAR. We immediately mark our position on our chart plotter as determined by our GNSS receiver. Sometime later we try to return to the position marked and can't find the target. What caused the errors?
FINDING THE TARGET
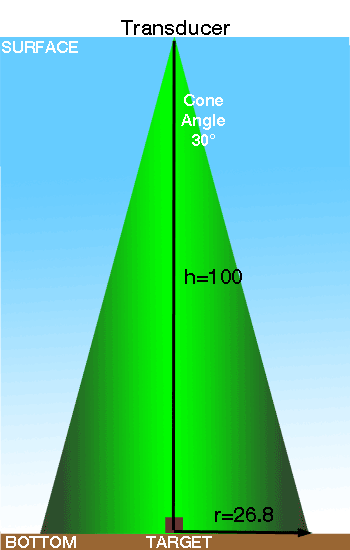
The first error in this process occurs in the SONAR. The target reflection is occurring from some point on the bottom that is in the cone of the SONAR signal. We assumed a circular pattern and a cone angle of 30-degrees. If the depth is 100-feet, then the radius of the circular area on the bottom that intersects our SONAR cone is defined by
circle radius = tan(coneAngle/2) x depth
--or--
circle radius = tan(15) x 100 = 26.8-feet
The actual target causing the reflection we see on the SONAR screen could be as far as 26.8-feet away from the SONAR transducer position directly overhead on the sea bottom.
The second error in the process occurs when the chart plotter marks the position. The position recorded is the position of the GNSS sensor, not the SONAR transducer. On a small boat it would be common that the SONAR transducer was mounted on the transom while the GNSS antenna was mounted at the helm. These two locations could be 10-feet apart. This is the GNSS antenna offset error
The third error occurs when the GNSS receiver deduces the position of its antenna. The deduced position is subject to many influences for accuracy. A nominal accuracy for an autonomous GPS without any assistance is plus or minus 5-meters in the horizontal plane. That is about 15-feet of error. This is the GNSS position error.
If we are particularly unlucky, all of these errors will lay on a straight line, and thus they will be additive. This gives us a maximum error for the waypoint position that is supposed to mark the SONAR target of
26.8-feet + 10-feet + 15-feet = 52-feet
of error in the waypoint position compared to the actual target location. The actual distance between the target and the recorded waypoint is 52-feet.
RETURNING TO TARGET
To get back over this target at some time in the future, we navigate to the recorded waypoint position. Our navigation is again subject to the error of the GPS position, or 15-feet. We can position the GPS sensor at the same position as the recorded waypoint, but we can only count on being within a circle of 15-foot radius. If we are again unlucky, the GPS position error will be in the opposite direction that it was when the waypoint was recorded. So not only is our waypoint 52-feet away from the target, when we return to the waypoint position there is a 15-feet error in the GPS range that, by chance, happens to be additive. Now the GPS sensor is 52+15 = 67-feet away from the target on the bottom.
But things are not done getting worse. If the orientation of the boat is also very unlucky for us, then the GPS tells us we are back to the waypoint, already 67-feet in error, the boat orientation will be aligned in the worst way, putting our SONAR transducer another 10-feet away from where it should be to find the target. The SONAR transducers is now 77-feet from the target.
Now we have to consider the SONAR cone coverage, but this time it actually helps us. Even though we might be out of position by 77-feet, we know that the SONAR cone is going to cover a circular area on the bottom of 27-foot radius. This puts the outer part of the SONAR code back to within 50-feet of the actual target. Unfortunately, we won't see that target on our SONAR.
CORRELATED v. UNCORRELATED ERRORS
In actual use, the errors do not tend to align for the worse outcome. The errors are likely to be uncorrelated. We repeat the analysis with the consideration that the errors will add as the root sum of squares. For the initial process of finding and marking the target, the uncorrelated errors will accumulate to
Waypoint Error = [ (SONARconeRadius)^2 + (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
Waypoint Error = (26.8^2 + 10^2 + 15^2)^0.5
Waypoint Error = 32-feet probable error between target location and waypoint location
Our stored waypoint is now only likely to be 32-feet in error from where the actual target is located on the sea bottom.
When we return to our stored waypoint, our GNSS position error and GNSS sensor offset also will be uncorrelated. The likely error will be
GPS Range and Location Offset Error = [ (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
GPS Range and Location Offset Error = (10^2 + 15^2)^0.5
GPS Range and Location Offset Error = 18-feet
This makes the chances of finding the original target better. On the surface of the water the SONAR transducer should be back to within 18-feet of the marked waypoint that recorded the target location. Unfortunately, we know that the marked waypoint position may likely have an error of 32-feet. But these two errors are also uncorrelated, so we assess the likely Total Error Distance between transducer and target to be
Total Return Location Error = [ (Initial Waypoint Error)^2 + (Returning GPS errors)^2)]^0.5
Total Return Location Error = [ (32)^2 + (18)^2) ]^0.5
Total Return Location Error = 36-feet, which is the likely distance between where the target is and where the transducer is upon returning
Now we look at the SONAR cone area on the bottom to see if the target will be within our cone of coverage. Unfortunately, in this example, the 27-feet radius of the SONAR cone may not detect the target that is 36-feet away.
IMPROVEMENTS
There are several areas for improvement in this example. At first, you might think that using a SONAR with a smaller cone angle would improve accuracy. It does, but only for the locating phase. If a transducer with a narrower cone angle were used to find the target, the initial error would decrease. For example, if we use a transducer with a 15-degree cone angle, the radius of bottom covered at 100-feet depth would decrease to 13-feet from 27-feet, reducing the error by half.
If the GPS sensor and SONAR sensor were co-located, the offset error could be reduced to zero. Let's assume we could get the two sensors within one-foot of each other, a tenfold reduction in that error.
If the GPS receiver utilizes augmentation, such as the Wide Area Augmentation System (WAAS), the ranging error could be reduced to about 7.5-feet from 15-feet, another reduction by half in the error.
The effect of these reduced errors would cause the initial waypoint error to decrease to
Waypoint Error = [ (SONARconeRadius)^2 + (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
Waypoint Error = (13^2 + 1^2+ 7.5^2)^0.5
Waypoint Error = 15-feet probable error between target location and waypoint location
Upon returning, we also experience an advantage. The GPS ranging error is again reduced, and the offset between GPS sensor and SONAR sensor is much more favorable. The new position error on return navigation is likely to be
GPS Range and Location Offset Error = [ (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
GPS Range and Location Offset Error = (1^2 + 7.5^2)^0.5
GPS Range and Location Offset Error = 7.6-feet
This makes the chances of finding the original target better. On the surface of the water the SONAR transducer should be back to within 7.6-feet of the marked waypoint that recorded the target location. Unfortunately, we know that the marked waypoint position may likely have an error of 15-feet. But these two errors are also uncorrelated, so we assess the likely Total Error Distance between transducer and target to be
Total Return Location Error = [ (Initial Waypoint Error)^2 + (Returning GPS errors)^2)]^0.5
Total Return Location Error = [ (15)^2 + (7.6)^2) ]^0.5
Total Return Location Error = 16.8-feet, or the likely distance between where the target is and where the transducer is upon returning.
Unfortunately, now the narrower cone angle works against us. The SONAR cone only covers 13-feet of the bottom. Again, we find that our SONAR transducer may not pick up the target. The solution perhaps is to use a narrow beam transducer to mark the target when initially finding it and storing a waypoint, and use a wider beam transducer to hunt for the target when trying to reacquire it upon return. Also on initial marking, better target accuracy may be obtained if the signal on the SONAR is peaked for strongest return signal before marking the waypoint.
It is also interesting to look at water depth. It really does not affect the outcome because the SONAR coverage area on the bottom is a function of water depth and cone angle. Water depth is already included in the calculation by its influence on the bottom coverage area. If the water depth were less, the area covered on the bottom would decrease, but it would similarly decrease when hunting for the target upon return.
CONCLUSIONS
There are only two elements of this problem in which improvement can be made. The offset distance between the GPS receiver antenna and the SONAR transducer locations should be made as small as possible. Any offset between them adds errors to both the initial locating of the waypoint and the eventual return to the waypoint location, both relative to the SONAR transducer. The use of GNSS augmentation to reduce ranging error calculation in the position finding will also directly reduce the total error in marking and return to a location. A possible third improvement can be made if the cone angle of the transducer used to initially mark the target is as narrow as possible, and the cone angle of the transducer used to hunt for the target on return is made wider. Employing all three techniques will tend to improve the chances to return to a SONAR target.
A further consideration is the behavior of the SONAR. The signal response of the transducer does not just immediately stop at its rated cone angle, nor is it completely uniform within the cone area; the sensitivity just decreases beyond the cone radius, and it is also variable within the cone radius. If care is taken to mark the target initially by peaking the target signal strength, then the target is more likely to be well aligned with the transducer location when the waypoint it taken. On return, some response, albeit weaker, from targets outside the cone radius will be helpful in finding the target.
Let us say we are boating and looking for a particular target on a SONAR. The target is stationary and is on the sea bottom. The water depth is 100-feet. We are using a SONAR transducer with a circular pattern and a cone angle of 30-degrees of flat response. While boating we observe a target on SONAR. We immediately mark our position on our chart plotter as determined by our GNSS receiver. Sometime later we try to return to the position marked and can't find the target. What caused the errors?
FINDING THE TARGET
The first error in this process occurs in the SONAR. The target reflection is occurring from some point on the bottom that is in the cone of the SONAR signal. We assumed a circular pattern and a cone angle of 30-degrees. If the depth is 100-feet, then the radius of the circular area on the bottom that intersects our SONAR cone is defined by
circle radius = tan(coneAngle/2) x depth
--or--
circle radius = tan(15) x 100 = 26.8-feet
The actual target causing the reflection we see on the SONAR screen could be as far as 26.8-feet away from the SONAR transducer position directly overhead on the sea bottom.
The second error in the process occurs when the chart plotter marks the position. The position recorded is the position of the GNSS sensor, not the SONAR transducer. On a small boat it would be common that the SONAR transducer was mounted on the transom while the GNSS antenna was mounted at the helm. These two locations could be 10-feet apart. This is the GNSS antenna offset error
The third error occurs when the GNSS receiver deduces the position of its antenna. The deduced position is subject to many influences for accuracy. A nominal accuracy for an autonomous GPS without any assistance is plus or minus 5-meters in the horizontal plane. That is about 15-feet of error. This is the GNSS position error.
If we are particularly unlucky, all of these errors will lay on a straight line, and thus they will be additive. This gives us a maximum error for the waypoint position that is supposed to mark the SONAR target of
26.8-feet + 10-feet + 15-feet = 52-feet
of error in the waypoint position compared to the actual target location. The actual distance between the target and the recorded waypoint is 52-feet.
RETURNING TO TARGET
To get back over this target at some time in the future, we navigate to the recorded waypoint position. Our navigation is again subject to the error of the GPS position, or 15-feet. We can position the GPS sensor at the same position as the recorded waypoint, but we can only count on being within a circle of 15-foot radius. If we are again unlucky, the GPS position error will be in the opposite direction that it was when the waypoint was recorded. So not only is our waypoint 52-feet away from the target, when we return to the waypoint position there is a 15-feet error in the GPS range that, by chance, happens to be additive. Now the GPS sensor is 52+15 = 67-feet away from the target on the bottom.
But things are not done getting worse. If the orientation of the boat is also very unlucky for us, then the GPS tells us we are back to the waypoint, already 67-feet in error, the boat orientation will be aligned in the worst way, putting our SONAR transducer another 10-feet away from where it should be to find the target. The SONAR transducers is now 77-feet from the target.
Now we have to consider the SONAR cone coverage, but this time it actually helps us. Even though we might be out of position by 77-feet, we know that the SONAR cone is going to cover a circular area on the bottom of 27-foot radius. This puts the outer part of the SONAR code back to within 50-feet of the actual target. Unfortunately, we won't see that target on our SONAR.
CORRELATED v. UNCORRELATED ERRORS
In actual use, the errors do not tend to align for the worse outcome. The errors are likely to be uncorrelated. We repeat the analysis with the consideration that the errors will add as the root sum of squares. For the initial process of finding and marking the target, the uncorrelated errors will accumulate to
Waypoint Error = [ (SONARconeRadius)^2 + (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
Waypoint Error = (26.8^2 + 10^2 + 15^2)^0.5
Waypoint Error = 32-feet probable error between target location and waypoint location
Our stored waypoint is now only likely to be 32-feet in error from where the actual target is located on the sea bottom.
When we return to our stored waypoint, our GNSS position error and GNSS sensor offset also will be uncorrelated. The likely error will be
GPS Range and Location Offset Error = [ (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
GPS Range and Location Offset Error = (10^2 + 15^2)^0.5
GPS Range and Location Offset Error = 18-feet
This makes the chances of finding the original target better. On the surface of the water the SONAR transducer should be back to within 18-feet of the marked waypoint that recorded the target location. Unfortunately, we know that the marked waypoint position may likely have an error of 32-feet. But these two errors are also uncorrelated, so we assess the likely Total Error Distance between transducer and target to be
Total Return Location Error = [ (Initial Waypoint Error)^2 + (Returning GPS errors)^2)]^0.5
Total Return Location Error = [ (32)^2 + (18)^2) ]^0.5
Total Return Location Error = 36-feet, which is the likely distance between where the target is and where the transducer is upon returning
Now we look at the SONAR cone area on the bottom to see if the target will be within our cone of coverage. Unfortunately, in this example, the 27-feet radius of the SONAR cone may not detect the target that is 36-feet away.
IMPROVEMENTS
There are several areas for improvement in this example. At first, you might think that using a SONAR with a smaller cone angle would improve accuracy. It does, but only for the locating phase. If a transducer with a narrower cone angle were used to find the target, the initial error would decrease. For example, if we use a transducer with a 15-degree cone angle, the radius of bottom covered at 100-feet depth would decrease to 13-feet from 27-feet, reducing the error by half.
If the GPS sensor and SONAR sensor were co-located, the offset error could be reduced to zero. Let's assume we could get the two sensors within one-foot of each other, a tenfold reduction in that error.
If the GPS receiver utilizes augmentation, such as the Wide Area Augmentation System (WAAS), the ranging error could be reduced to about 7.5-feet from 15-feet, another reduction by half in the error.
The effect of these reduced errors would cause the initial waypoint error to decrease to
Waypoint Error = [ (SONARconeRadius)^2 + (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
Waypoint Error = (13^2 + 1^2+ 7.5^2)^0.5
Waypoint Error = 15-feet probable error between target location and waypoint location
Upon returning, we also experience an advantage. The GPS ranging error is again reduced, and the offset between GPS sensor and SONAR sensor is much more favorable. The new position error on return navigation is likely to be
GPS Range and Location Offset Error = [ (GNSS antenna offset)^2 + (GNSS position error)^2 ]^0.5
GPS Range and Location Offset Error = (1^2 + 7.5^2)^0.5
GPS Range and Location Offset Error = 7.6-feet
This makes the chances of finding the original target better. On the surface of the water the SONAR transducer should be back to within 7.6-feet of the marked waypoint that recorded the target location. Unfortunately, we know that the marked waypoint position may likely have an error of 15-feet. But these two errors are also uncorrelated, so we assess the likely Total Error Distance between transducer and target to be
Total Return Location Error = [ (Initial Waypoint Error)^2 + (Returning GPS errors)^2)]^0.5
Total Return Location Error = [ (15)^2 + (7.6)^2) ]^0.5
Total Return Location Error = 16.8-feet, or the likely distance between where the target is and where the transducer is upon returning.
Unfortunately, now the narrower cone angle works against us. The SONAR cone only covers 13-feet of the bottom. Again, we find that our SONAR transducer may not pick up the target. The solution perhaps is to use a narrow beam transducer to mark the target when initially finding it and storing a waypoint, and use a wider beam transducer to hunt for the target when trying to reacquire it upon return. Also on initial marking, better target accuracy may be obtained if the signal on the SONAR is peaked for strongest return signal before marking the waypoint.
It is also interesting to look at water depth. It really does not affect the outcome because the SONAR coverage area on the bottom is a function of water depth and cone angle. Water depth is already included in the calculation by its influence on the bottom coverage area. If the water depth were less, the area covered on the bottom would decrease, but it would similarly decrease when hunting for the target upon return.
CONCLUSIONS
There are only two elements of this problem in which improvement can be made. The offset distance between the GPS receiver antenna and the SONAR transducer locations should be made as small as possible. Any offset between them adds errors to both the initial locating of the waypoint and the eventual return to the waypoint location, both relative to the SONAR transducer. The use of GNSS augmentation to reduce ranging error calculation in the position finding will also directly reduce the total error in marking and return to a location. A possible third improvement can be made if the cone angle of the transducer used to initially mark the target is as narrow as possible, and the cone angle of the transducer used to hunt for the target on return is made wider. Employing all three techniques will tend to improve the chances to return to a SONAR target.
A further consideration is the behavior of the SONAR. The signal response of the transducer does not just immediately stop at its rated cone angle, nor is it completely uniform within the cone area; the sensitivity just decreases beyond the cone radius, and it is also variable within the cone radius. If care is taken to mark the target initially by peaking the target signal strength, then the target is more likely to be well aligned with the transducer location when the waypoint it taken. On return, some response, albeit weaker, from targets outside the cone radius will be helpful in finding the target.